SOLUCIÓN EN LA HOJA DE PLOTEO O EN LA CARTA NÁUTICA
El buque patrullero A se encuentra navegando (Ra=045º Va=10 nudos), y a las 12:00 Hrs. Observa al buque B en Demora 027º y una Dradar=11.5 millas, a las 12:05 lo observa en una demora 030º Dradar=10millas, con estos datos Realizar la intercepción por sospecha de tráfico ilícito .
PASOS A SEGUIR
I.- Derminar: Rb y Vb teniendo por datos Ra1 , Va, Rr1 y Vr1
II.- Determinar:
Ra2 y Vr2 teniendo Va, Rr2, Rb y Vb
Para dar
solución al epígrafe 1
1.- Situamos en una hoja de ploteo o carta, las posiciones de A en el centro de
la hoja de ploteo o latitud y longitud
en la carta y la posición de
B a las 12:00 hrs. Demora 027º, Dradar = 10 millas con respecto a A y a las
12:05 Demora = 030º Dradar =10 millas
2.-
Unimos con una recta los puntos B
y B1 y lo prologamos en ese mismo sentido, este será la dirección del movimiento relativo de B con respecto A .
3.-
Teniendo en cuenta el espacio relativo recorrido
por B, BB1=1.5 millas y el tiempo que demoro
en recórrelo, se halla la velocidad relativa
Vr= (BB1X60)/Tminutos= (1.5 x60) /5
= 18 nudos
4.-
Como ya se tienen los valores de dos
vectores Va,Vr, se procede a construir el triangulo de velocidad para poder
hallar el tercer vector Vb, para lo cual.
5.-.-
En el punto donde se encuentra el buque
B construimos el triangulo de velocidad
para hallar el Rb y la Vb, de la siguiente forma.
a.- A partir de B prolongamos la
dirección del movimiento relativo inicial Rr1 = 194º y sobre la misma el modulo de la Vr1 =18 nudos
b.- A partir de la saeta de Vr1 situamos Ra = 045 pero con sentido
contrario o se -Va= 10nudos
c.- Uniendo la saeta de Vr con la saeta de -Va, (Vr-Va=Vb la magnitud dada nos va a dar el modulo de Vb = 11 nudos y su sentido
nos dara Rb=164º
Para dar solución al
epígrafe II
Ya tenemos los datos relativos al rumbo y la velocidad
de B y también tenemos el rumbo de relativo de intercepción y la velocidad a la
cual queremos realizarla, por lo cual tenemos cuatro de los 6 parámetros del triangulo
de velocidad, a partir de ahí procedemos a construir el triangulo de
velocidad para hallar los otros dos
vectores que es el rumbo de intercepción y la velocidad relativa de
intercepción,

a.- A partir de B1 Ploteamos el Rb= 160º Vb= 11 nudos
b.- con una apertura del compas igual a Va=10 nudos nudos,haciendo centro en la saeta del vector
Vb
cortamos el Rr2 en el punto E, la magnitud de la
linea B1E es el modulo del Vr=14 nudos de
intercepción.
b.- El punto que une la saeta del
vector Vr2 (Punto E) con la saeta de Vb (Punto F) será el rumbo que debe
hacer el buque A para realizar la intercepción con esa velocidad de -Va =10 nudos Ra= 082º.
3.- El tiempo que demora para que
A intercepte al buque B , será igual a:
tm= (B1A x 60)/ Vnudos = (10x60)/14 =
42.8 minutos
Por lo que la intercepción se
efectuara a la 12:47.8
SOLUCION EN LA ROSA DE MANIOBRA
El buque A se enuentra navegando (Ra=045º Va= 10 nudos) y a las 12:00 Hrs. Observa buque B en Demora 027º y una Dradar =11.5
millas y a las 12:05 en una demora 030º Dradar=10millas, con estos
datos Realizar la intercepción a las 10:05
PASOS A SEGUIR
I.- Derminar: Rb y Vb teniendo
por datos Ra1 , Va, Rr1 y Vr1
II.- Determinar: Ra2 y Vr2 teniendo
Va, Rr2, Rb y Vb
Para dar
solución al epígrafe I
1.- Se escogen las escalas a utilizar en las distancias ( un circulo
igual a una milla) y en las velocidades , (un circulo igual a 2 nudo)
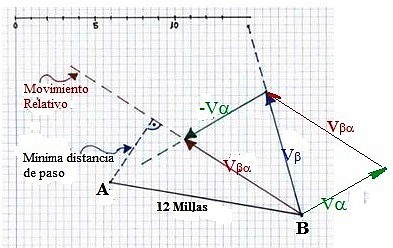
2.-Ploteamos las posiciones del buque B con respecto al buque A situado en el centro de la rosa
12:00 hrs en
Demora 027º Dradar =11.5 millas y a
las 12:05 en demora 030º Dradar = 10 millas.
3.- Uniendo B con B1 tenemos la dirección del
movimiento relativo Rr1= 194º y la distancia BB1= 1.5
millas es la distancia recorrida en
5 minutos que nos permite determinar Vr1= 18 nudos
Vr1= (Sr1x60)/5 = (1.5x60)/5= 18 nudos.
También podemos
utilizar la escala logarítmica en el inferior de la rosa para calcular Vr1
4.- Construimos el triangulo vectorial
a.- A partir del punto A ploteamos Ra=045º Va=10 nudos
b.- A partir de la saeta de Va trazamos la linea del movimiento relativo Rr1 y sobre la misma colocamos el modulo de Vr1 en el mismo sentido.
c.- Uniendo el punto A con la saeta de Vr1 nos dara Rb=164º Vb=11 nudos

1.- Unamos los puntos B1 y A, lugar donde se encuentran ambos buques a las 12:05 , esta línea nos dará la dirección del movimiento relativo de intercepción Rr2.
2.- El Rr2 lo trasladamos hasta la saeta del vector Vb pero en sentido contrario hasta cortar el circulo de la velocidad del buque A, Va de intercepción a 10 nudos equivalente a cinco círculos. El Modulo de Vr2=14 nudos
3.- Unimos el centro de la rosa en el punto donde se corten el Rr2 con el circulo de 10 nudos y nos dará el nuevo rumbo a realizar por A parra interceptar al buque B a esa velocidad Ra2= 082º
4.- Para determinar el tiempo de intercepción, teniendo en cuenta que la distancia a recorrer desde B hasta A es 10 millas y la Vr = 14 nudos.
t= (B1Ax60)/Vr2 = (10x60)/14 = 42.8 minutos.
5.- La interrupción ocurrirá a las 12:47.8 hrs.
6.- Si queremos ver los movimientos reales de los buquea a partir de las posciones A y B1
a.- A partir del punto B tracemos el Rb= 164 y a partir del punto A tracemos el Ra2= 082º , hasta que se corte con el rumbo de B y obtendremos el punto de intercepción B2



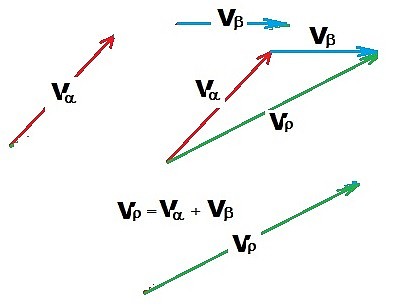

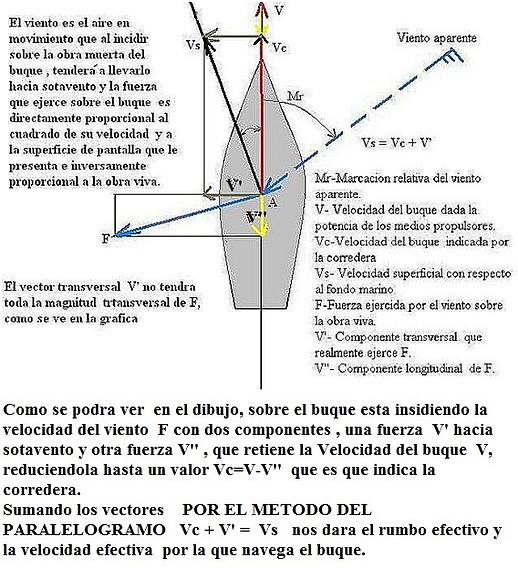
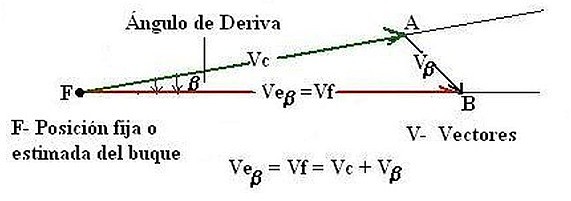
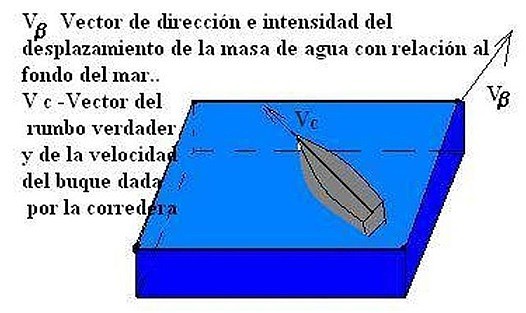
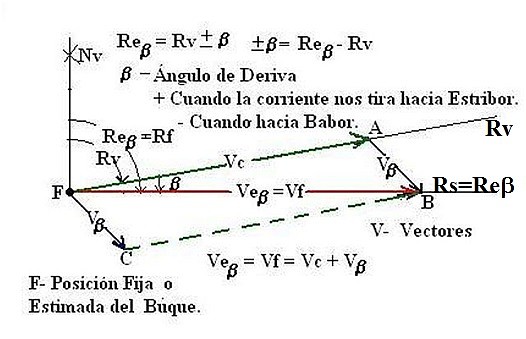 Recordemos que en el buque las corrientes marinas ocasiona que un buque al pairo o al garete se movería, tal como si estuviera sobre una alfombra mágica su derrota real o efectiva sería la de la corriente , si no hubiese otra fuerza que actuara sobre él . Al ponerse en marcha el buque con un rumbo y una velocidad dada, la derrota real o efectiva con respecto al fondo seria la suma de dos vectores , uno el vector de la corriente y el otro el vector velocidad .
Recordemos que en el buque las corrientes marinas ocasiona que un buque al pairo o al garete se movería, tal como si estuviera sobre una alfombra mágica su derrota real o efectiva sería la de la corriente , si no hubiese otra fuerza que actuara sobre él . Al ponerse en marcha el buque con un rumbo y una velocidad dada, la derrota real o efectiva con respecto al fondo seria la suma de dos vectores , uno el vector de la corriente y el otro el vector velocidad .